A Functional History of Numbers (2 of 3)
In part one of this functional history of numbers we saw the development of various number systems we are mostly familiar with. In this part, we will see the development of many number systems that are important for our modern scientific needs, geometrically and computationally. The sad fact about these developments is that we are using and teaching less effective number systems today because of a “series of unfortunate events” that took place during the grand drama of human development of modern mathematics.
Missing the Truth in Pursuit of Beauty
Sir William Rowan Hamilton a renounced Irish physicist, astronomer, and mathematician had been interested in complex numbers for a long time. Motivated by the beautiful geometric properties of complex numbers, he was obsessed with generalizing complex numbers to 3 dimensional space while keeping the most fascinating property of complex numbers: the unification of points (data) and transformations (processing) in a single algebraic entity while applying the transformations to points using algebraic multiplication and formal summation. Out of this preoccupation Hamilton was to invent the most beautiful algebra of the century: the algebra of quaternions. Hamilton never arrived at his beautiful generalization; it simply does not exist in the way he imagined. A fact about generalizations of abstract concepts is that they’re not free; with any generalization of a concept we must give up some of its properties. Often we cannot choose and control an arbitrary set of properties to generalize for some concept; this set may be consistent with the original concept but inconsistent with its generalization. Sadly enough, Hamilton and his followers made some big mistakes that almost banished quaternion algebra from practical applications in physics and engineering for a very long time1. They literally missed the true beauty of quaternions as rotation operators2 in their stubborn pursuit of a specific form of beauty they imagined as pure mathematicians: a method to divide 3D vectors just like complex numbers. The full story of this unfortunate event can be found in Simon L. Altmann intriguing paper “Hamilton, Rodrigues, and the Quaternion Scandal”3.
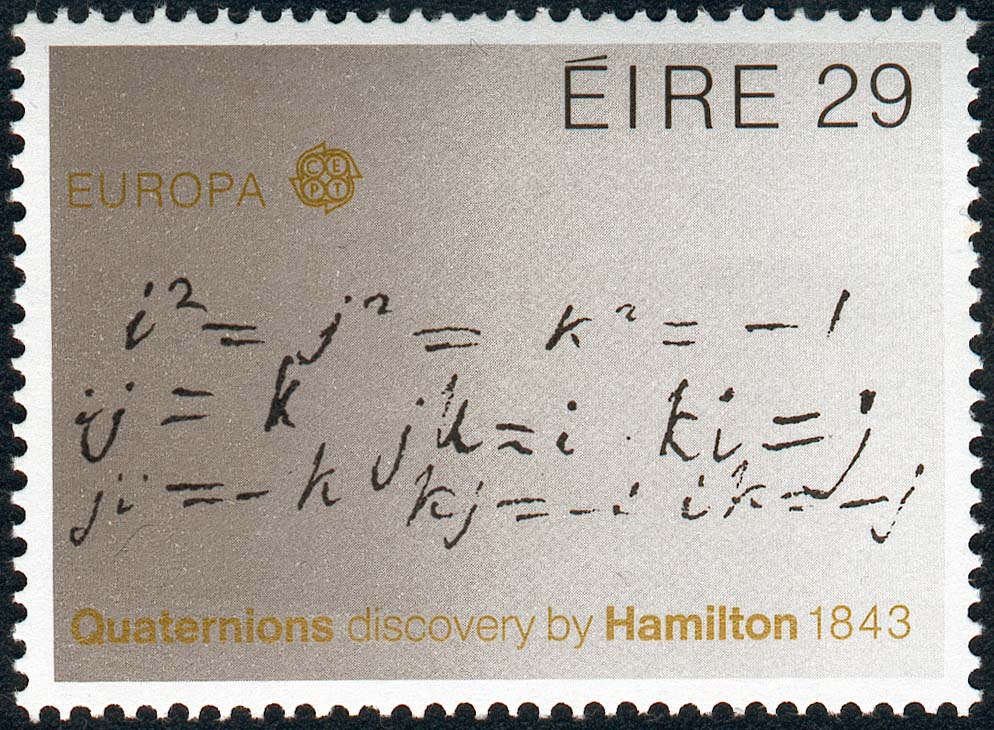
On the morning of Monday, 16 October 1843 Hamilton, accompanied by Lady Hamilton, was walking along the Royal Canal in Dublin towards the Royal Irish Academy, where Hamilton was to preside at a meeting. As he was walking past Broome Bridge (referred to as Brougham Bridge by Hamilton and called by this name ever since), Hamilton, in a flash of inspiration, realized that three, rather than two, imaginary units were needed in 3D space, with the properties i^{2}=j^{2}=k^{2}=-1,\;ij=-k,\;ji=-k and cyclic permutation. Hamilton carved these formulae on the stone of the bridge; poor Lady Hamilton had to wait. Armed now with four units, Hamilton called the number A=a\,1+A_{x}\,i+A_{y}\,j+A_{z}\,k where the coefficients here are all real, a quaternion. Hamilton made the product ij=-ji non-commutative. Not only was this the first time that a non-commutative product appeared in mathematics, but this was a true stroke of genius which has given us the last possible associative division algebra4. As a complex number C=x+iy is the formal sum of a real part x and an imaginary part iy, a quaternion Q_{A}=a\,1+A_{x}\,i+A_{y}\,j+A_{z}\,k can be viewed as a formal sum of the real part a and the “pure-quaternion” part A=A_{x}\,i+A_{y}\,j+A_{z}\,k. It follows that the product of two quaternions Q_{A}=a+A and Q_{B}=b+B is given by: Q_{A}Q_{B}=(ab-A\cdot B)+(aB+bA+A\times B) where A\cdot B=A_{x}B_{x}+A_{y}B_{y}+A_{z}B_{z} and A\times B=(A_{y}B_{z}-A_{z}B_{y})\,i+(A_{z}B_{x}-A_{x}B_{z})\,j+(A_{x}B_{y}-A_{y}B_{x})\,k
Although Hamilton did not give names or symbols for these operations, it is here that the scalar and vector products of two vectors appear for the first time in history. The big mistake Hamilton made was treating the pure-quaternion part as a vector (actually it’s a bivector); he even named it a vector. He then treated rotations in 3D space using his newly invented algebra but with many internal contradictions stemming from his imagined goal of generalizing complex numbers while preserving all their “algebraically beautiful properties”. Two other unfortunate events happened in the drama of quaternions. First, Gauss had actually discovered quaternions but had never bothered to publish, as shown by Gauss’s notes from 1819, published in 1900; that certainly didn’t help Hamilton’s case. Second, a treatment of rotations and quaternions had been going on for some years before 1843, quite independently of Hamilton and taking a diametrically opposed view to his. This treatment was entirely geometrical, and because it tried to do a simple job in a simple way it was clear and precise and it was entirely successful, but it was largely ignored by everyone. It was Olinde Rodrigues in his 1840 paper who provided a construction to Euler’s rotation theorem correctly linking quaternions to rotations 5. Hamilton himself geometrically rediscovered the results of the Rodrigues construction but completely ignored its importance; probably blinded by his original goal of “algebraic beauty”.
After Hamilton’s death, his work began to give fruits but not in the direction which he had expected. His ideas of vectors and of their scalar and vector products were much too important so that people began to try and graft a new skin onto them in order to make these concepts usable. Grassmann in Germany and Heaviside in Britain moved some way in this direction, but they were not much more transparent than Hamilton himself. It was left to Willard Gibbs of Yale to produce not only the first coherent picture of vectors and of their operations but also a good and successful working notation; effectively eliminating quaternions, with all their true beauty as rotation operators, from the picture. This hardened the response of Hamilton’s followers as one of them, Peter Tait, stated:
Even Prof. Willard Gibbs must be ranked as one of the retarders of quaternion progress, in virtue of his pamphlet on Vector Analysis, a sort of hermaphrodite monster, compounded of the notations of Hamilton and of Grassmann.
This was not the end of the story for quaternions. They would resurface many years later as advantageous rotation operators in 3D space; currently used in robotics, aviation, and computer graphics to name a few applications. Nevertheless, many important lessons can be taught from the story of the last division algebra. The main lesson being: you have to consistently follow the truth and it will lead to more beauty than the one you might imagine.
Hyperspace and the Womb of Numbers
It’s said that necessity is the mother of invention; sometimes the lack of necessity brutally kills brilliant ideas. Linear algebra is a fascinating subject with applications in almost every field of science and engineering6. When you search for a definition for the term “Linear Algebra” you will find a definition like:
Linear Algebra is a branch of mathematics that is concerned with mathematical structures closed under the operations of addition and scalar multiplication and that includes the theory of systems of linear equations, matrices, determinants, vector spaces, and linear transformations.
— Merriam Webster online dictionary.
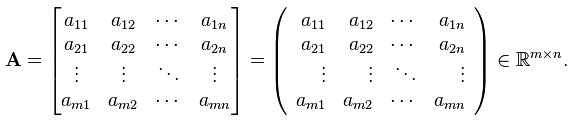
When you take a look at some books about the subject you will find two kinds of books. The first kind7 mostly deals with linear equations, coordinate vectors (i.e. tuples of numbers), matrices, and determinants; this may give the wrong impression that linear algebra is nothing more than the study of matrix algebra and coordinate vectors in Euclidean space. The second kind of books8 deals with an abstract concept of vectors and linear transformations defined axiomatically without giving any special importance to coordinates, and applicable to any metric space Euclidean or not. Now matrices are put to perspective as no more than computational and representational tools for the subject, not the subject itself. Historically9 the first use of linear equations of 2 and 3 unknowns date back to ancient Babylonians and Chinese. The modern study of systems of linear equations can be said to have originated with Leibniz, who in 1693 invented the notion of a determinant for this purpose. Following developments took place by Cramer, Euler, Gauss, Laplace, Cauchy, Weierstrass, Kronecker, Cayley, Frobenius, and many others. All such developments were based on applications from diverse fields of mathematics and physics; a sign of the necessity and universality of linear algebra. In 1848, J.J. Sylvester introduced the term “matrix”, the Latin word for womb and a word related to “mother”, as a name for an array of numbers. By the year 1880, many of the fundamental results of linear algebra had been established, but they were not considered as parts of a general theory. In particular, the fundamental notion of vector space, within which such a theory would be framed, was absent. Matrices and coordinate vectors, out of necessity, are at the core of the historical development of linear algebra and vector spaces. In our modern computational age, any software library dealing with linear algebra must have matrices and their computational algorithms as the main component. Every engineer in the world must have some idea about the Matrix Laboratory; MATLAB.
One mathematician took a fundamentally different approach to linear algebra than all others hoping to approach Leibniz’s dream of a universal algebra that can deal directly and simply with geometric entities10; he was Hermann Günther Grassmann. Many have written about the extraordinary role of Grassmann’s work in modern mathematics and physics including Roger Penrose11, David Hestenes12, and many others13. Desmond Fearnley-Sander describes how Grassmann developed linear algebra by himself in his paper “Hermann Grassmann and the Creation of Linear Algebra”. From the beginning, Grassmann distinguished linear algebra, as a formal theory independent of any interpretation, from its application in geometry. Grassmann described the concept of vector space and developed the theory of linear independence in a way which is astonishingly similar to the presentation one finds in modern linear algebra texts. He defined the concepts of subspace, linear independence, span, dimension, join and meet of subspaces, and projections of elements onto subspaces. He proved the invariance of dimension under change of basis and obtained the formula for change of coordinates under change of basis. He defined elementary transformations of basis and showed that every change of basis is a product of elementaries. His work led Peano in 1888 to put down the formal definitions of linear algebra that was ignored for 30 years until 1920 when Hermann Weyl and others published formal definitions resulting in the widespread of linear algebra ever since. Few have come closer than Hermann Grassmann to creating, single-handedly, a new subject. In addition, the first fundamental investigation in multi-dimensional geometry was provided by Grassmann in 1844, in which affine geometry was developed not only for three-dimensional space but for multi-dimensional space also. That it was Grassmann who succeeded in establishing an articulated theory of multidimensional space seems to be due largely to the fact that Grassmann was not under the influence of other great mathematicians of his time, and to his predilection for philosophical generalizations14. The following is an extract from the Foreword of “Die Ausdehnungslehre: Vollständig und in strenger Form bearbeitet” (The Theory of Extension, Thoroughly and Rigorously Treated) published by Grassmann in 1862:
I remain completely confident that the labor I have expended on the science presented here and which has demanded a significant part of my life as well as the most strenuous application of my powers, will not be lost. It is true that I am aware that the form which I have given the science is imperfect and must be imperfect. But I know and feel obliged to state (though I run the risk of seeming arrogant) that even if this work should again remain unused for another seventeen years or even longer, without entering into the actual development of science, still that time will come when it will be brought forth from the dust of oblivion and when ideas now dormant will bring forth fruit. I know that if I also fail to gather around me (as I have until now desired in vain) a circle of scholars, whom I could fructify with these ideas, and whom I could stimulate to develop and enrich them further, yet there will come a time when these ideas, perhaps in a new form, will arise anew and will enter into a living communication with contemporary developments. For truth is eternal and divine and no phase of it … can pass without a trace; it remains in existence even if the cloth in which weak mortals dress it disintegrates into dust.
Grassmann expected his ideas would be revived even if unused for 17 years or longer; it actually took a hundred years. At that time in the 19th century, Grassmann’s ideas (especially in geometry) were revolutionary; they were too advanced for the necessities of his age. Ironically, Grassmann was renowned in his day as a linguist but as a mathematician, he had poor notational skills. His ideas were great but his symbolic expression of them was awkward. Few mathematicians of his age acknowledged his brilliance. One of them was the English mathematician and philosopher William Kingdon Clifford. Clifford was the one who would give new form and meaning to Grassmann’s ideas.
Lost and Found: Geometric Algebra
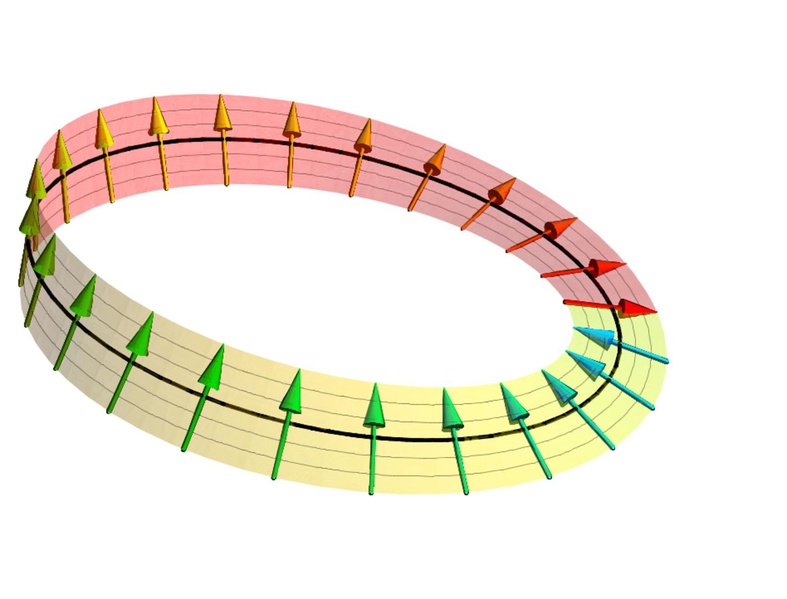
Grassmann’s vectors and subspaces were not numbers in a way complex numbers and quaternions are. In Grassmann algebra, a finite set of n vectors, representing 1-dimensional subspaces analogous to lines passing through the origin of a coordinate system of the space, are combined using his exterior product to algebraically form entities representing all other subspaces of dimension 2 to n. Grassmann had no interest, however, in representing transformations that “rotate” a subspace into another of the same dimension; something all physical and engineering models require to stand and function. Hamilton had the correct algebra for rotating vectors in 3-dimensional space but no generalization to n-dimensional space was present. While Hamilton lost his way insisting on treating rotations in 3D with the algebra of quaternions using direct multiplications, the brilliant but short-lived English mathematician William Kingdon Clifford took the correct path of generalizing rotations to the n-dimensional spaces of Grassmann15; the resulting beautiful mathematical abstraction was called Clifford Algebra. Clifford successfully unified and generalized Hamilton’s quaternions and Grassmann’s vector spaces in a uniform manner that affected physics and science ever since. His motivation was to create an algebra that can act on strange but common objects in geometry and physics called spinors. A spinor is an abstraction of an object that reverses its direction when rotated by an odd number of full cycles in space; contrary to our common intuition about physical 3D objects. Clifford also wrote his report at Cambridge “On the Space-Theory of Matter”, published in 1876, anticipating Albert Einstein’s general relativity by 40 years. Clifford’s contemporaries considered him acute and original, witty and warm. Felix Klein wrote, regarding Clifford,
I recall him with particular pleasure, as a man who understood me thoroughly from the first and soon extended my research.
Clifford was also working late into the night, he collapsed twice in two years from overworking, which may have led to his death at a young age; another unfortunate event for the development of his geometric numbers. Although Clifford recognized his algebra’s unique significance as a representation of geometric concepts as conceived by Grassmann, mathematicians abstracted Clifford algebra from its geometric origins after his death and, for the better part of a century, it languished as a minor sub-discipline of mathematics; one more algebra among so many others16.
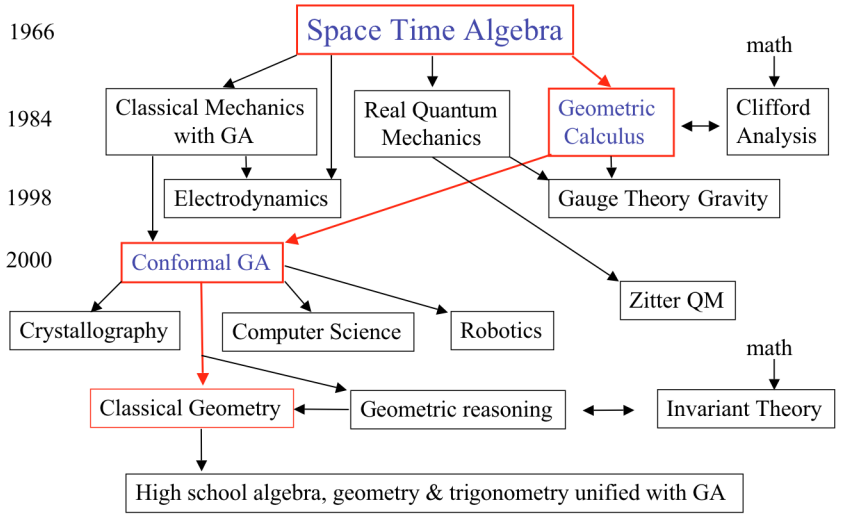
In 1966 David Orlin Hestenes published his book “Space-Time Algebra”, motivated by a set of lecture notes by Marcel Riesz later published in 1993; launching him along three main lines of research:
- A straightforward reformulation of classical physics in terms of Clifford’s geometric algebra producing the first comprehensive coordinate-free treatment of Newtonian mechanics, including rotational dynamics as explained in his book “New Foundations for Classical Mechanics”, in addition to a similar reformulation of classical electrodynamics.
- Reformulating the Dirac equation in terms of Geometric Algebra. This revealed a hidden geometric structure in quantum mechanics, including a hitherto unrecognized geometric interpretation for the unit imaginary relating it unequivocally to electron spin.
- To produce a self-contained system of mathematical tools sufficient for addressing any problem in physics without resorting to alternative mathematical formalisms; as explained in his book “Clifford Algebra to Geometric Calculus, A Unified Language for Mathematics and Physics”.
Hestenes received several awards related to his efforts in teaching physics using GA. As he describes his work in reviving Clifford and Grassmann’s work:
I was consciously concerned with questions relating the structure of these mathematical systems to the structure of the physical world. One day Riesz’s notes appeared on the new-book shelf of the UCLA library. The impact on me was immediate and striking! By the time I was half way through the first chapter I was convinced that Clifford algebra was the key to unifying mathematical physics. During the next few years I worked out the framework for a fully geometric unification. The result was published in my book Space Time Algebra (1966). Fortunately, my book was widely distributed, and it helped me establish many fruitful contacts throughout the world in subsequent years. However, I believe its impact would have dissipated had I not followed it up with years of further research, lectures and publications. Also, I believe that the significance of Riesz’s notes would have remained unrecognized without the citation in my book, which eventually led to publication (in 1993). Though the book launched me on a program to unify mathematical physics, I refrained from proclaiming the product as a universal Geometric Algebra and Calculus until subsequent research convinced me that was fully justified. I was well aware that its roots were in the work of Grassmann, but it was not until the English translations of the Ausdehnungslehre by Lloyd Kannenberg that I realized how deep those roots were.
Later on, Hestenes ideas in physics found their way into many computer science and engineering applications over the last 15 years. We are still at the beginning of the road to exploring this powerful abstract number system for our ever growing geometric dependent applications.
GA’s Multivectors: The Spacious Number System
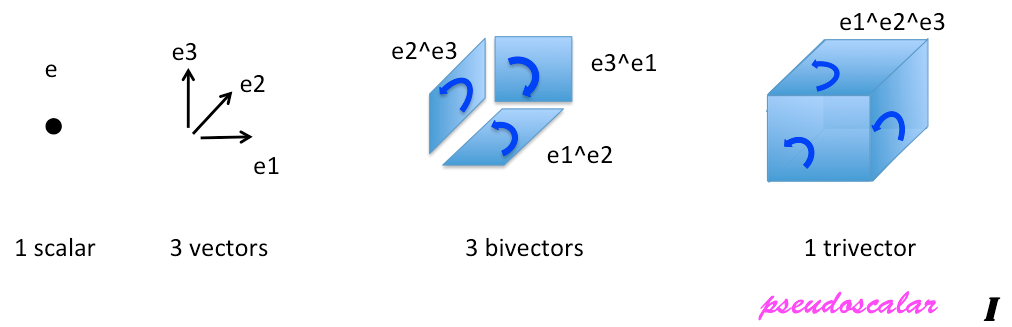
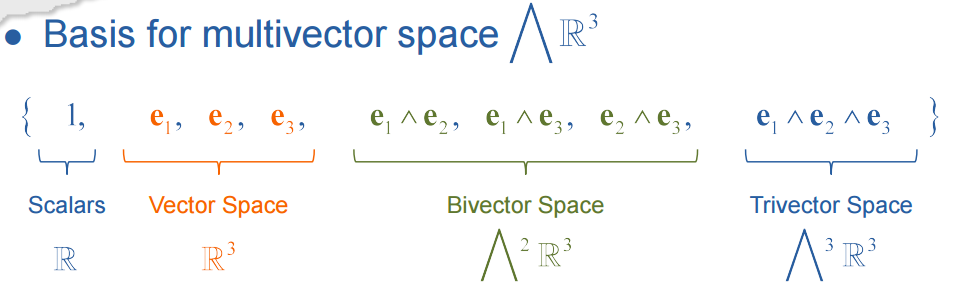
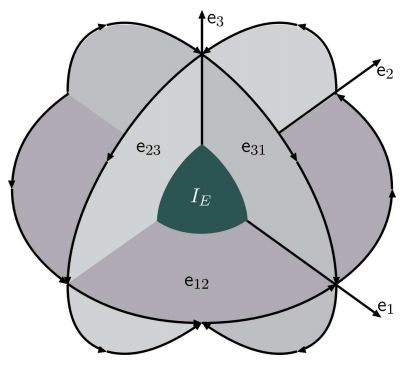
A geometric algebra is constructed from a set of n basis vectors on a scalar field (for example real or complex numbers) and a symmetric bilinear form defining the metric (i.e. the scalar-valued inner product of pairs of basis vectors). Using Clifford’s geometric product a set of 2^{n} basis blades, representing main subspaces of the algebra of dimensions 0 to n, are constructed. Multivectors, our geometric numbers, are linear combinations of the basis blades. All GA algebraic operations and beauty follow from this simple construction.
I will not go into the mathematical and geometric properties of GA in this post, after all, the whole site is dedicated to exploring GA, but I will mention some of its general characteristic strengths as an algebraic language for geometry compared to traditional matrix-based linear algebra for geometric modeling17:
1. GA can be used to model many geometries including non-Euclidean ones. The same algebraic structure can have many geometric modeling interpretations18.
2. Many familiar algebraic entities can be considered isomorphic to special cases of multivectors. These include real numbers, complex numbers, quaternions, and vectors of many types (position, direction, and normal vectors), Many types of matrices, typically used as linear transforms, can be replaced by GA multivectors including orthogonal matrices, Pauli matrices, and homogeneous transform matrices.
3. Grassmann’s outer product can be used inside GA to construct algebraic entities called blades, one type of multivectors, that represent subspaces of the base vector space. Depending on the selected geometric model for the vectors, blades will be a systematic representation of geometric primitives inside the selected geometry.

4. Linear transformations on the base vector space can be easily extended and directly applied to blades (subspaces) using what is called outermorphisms. Now we can algebraically manipulate the geometric primitives of our selected geometry by linear transformations without the use of matrices if we want.
5. Orthogonal transformations (linear transformations consisting of a series of reflections on hyperplanes) are very important for many geometric applications. GA can efficiently represent and apply such transformations using a special kind of multivectors called a versor. This is a very good alternative for orthogonal matrices both theoretically and computationally in many situations.
6. Verosrs can be applied to geometric constructions in a “covariant” manner. In traditional matrix algebra, we need to analyze a subspace, representing some geometric entity, to its vector components before applying the orthogonal transform then reconstruct the transformed subspace\entity from the transformed vectors. In GA we can directly apply orthogonal transforms to geometric entities using versors and blades with no need for any extra overhead.
7. In GA many blades can act as versors, leading to the use of geometric entities as orthogonal transformations. One can, say, rotate a plane and reflect a circle on the rotated plane using the same multivectors with no conversion to any other algebraic representations. This is a very different concept, and indeed a very powerful one, compared to the traditional matrix algebra approach.

8. In some cases, GA can be used to find closed form expressions for geometric interpolations and perturbations of non-trivial kinds. This would very much help in developing algorithms for important geometric models.
9. GA can work well with traditional matrix-based modeling techniques. One can use a linear algebra software library and interface it with a GA model easily; no need to model everything into GA from scratch.
10. All the above and other GA characteristics can make life much easier for people creating computational code for geometric modeling applications. GA is consistent and systematic algebraically with direct geometric interpretation. You just need to select your model and do the math; programming is straight forward. For example take a look at these videos created using the Versor GA library.
All these unique characteristics will certainly have deep influence, over the long run, on our understanding and development of geometric models in science and engineering. Many problems related to practical use and teaching of GA remain to be solved, but the concept had already been proven and the way is now much more clear for many researchers. In our next and final part of this functional history of numbers we will investigate another kind of numbers; the numbers we use in computing everything.
- During my research for this post I found that the 1873 edition of James Clerk Maxwell’s “A Treatise on Electricity and Magnetism” contains 20 Quaternion Equations that later were rewritten by Oliver Heaviside, et al.. See here and here for some details ↩
- Simon L. Altmann, “Rotations, Quaternions, and Double Groups”. Oxford University Press 1986 ↩
- Simon L. Altmann, “Hamilton, Rodrigues, and the Quaternion Scandal”. Mathematics Magazine 62 (5): 306, December 1989. JSTOR 2689481. ↩
- As later proven by Frobenius that the only possible associative division algebras are the real, complex, and quaternion algebras ↩
- N. J. Wildberger has a series of video lectures on famous math problems, four of which introduce the rotation problem and Hamilton’s discovery of quaternions; the series can be found here. ↩
- See this intriguing video for a glimpse ↩
- For example David Poole, “Linear Algebra, a Modern Introduction, 4th Edition”. Cengage Learning 2015 ↩
- For example Sheldon Axler, “Linear Algebra Done Right, Third Edition”. Springer 2015 ↩
- Israel Kleiner, “A History of Abstract Algebra”. Birkhauser Boston 2007 ↩
- Gottfried Leibniz, letter to Christian Huygens (8 September 1679) “I believe that, so far as geometry is concerned, we need still another analysis which is distinctly geometrical or linear and which will express situation directly as algebra expresses magnitude directly.”, in Gottfried Leibniz “Philosophical Papers and Letters, 2nd Edition”. Springer 1976 ↩
- Roger Penrose, “The Road to Reality: A Complete Guide to the Laws of the Universe”. Vintage 2007 ↩
- Gert Schubring (Editor), “Hermann Günther Graßmann (1809–1877): Visionary Mathematician, Scientist and Neohumanist Scholar, Papers from a Sesquicentennial Conference”. Springer Netherlands 1996 ↩
- Hans-Joachim Petsche, Albert C. Lewis, Jörg Liesen, Steve Russ (Editors), “From Past to Future: Graßmann’s Work in Context, Graßmann Bicentennial Conference, September 2009”. Springer Basel 2011 ↩
- A.N. Kolmogorov and A.P. Yushkevich (Editors), “Mathematics of the 19th Century, Mathematical Logic Algebra Number Theory Probability Theory”. Birkhäuser Basel 2001 ↩
- For a good explanation of the differences between Grassmann algebra and Clifford algebra see Roger Penrose’s book “The Road To Reality” ↩
- David Hestenes, “Oersted Medal Lecture 2002: Reforming the Mathematical Language of Physics”. American Journal of Physics 71, 104 (2003) ↩
- For more very interesting details see Leo Dorst, Daniel Fontijne, and Stephen Mann, “Geometric Algebra for Computer Science (Revised Edition): An Object-Oriented Approach to Geometry”. Morgan Kaufmann 2009 ↩
- G. Sommer (Editor), “Geometric Computing with Clifford Algebra”. Springer-Verlag Heidelberg 2000 ↩

{kind=link}
{kind=link}